Robot chien
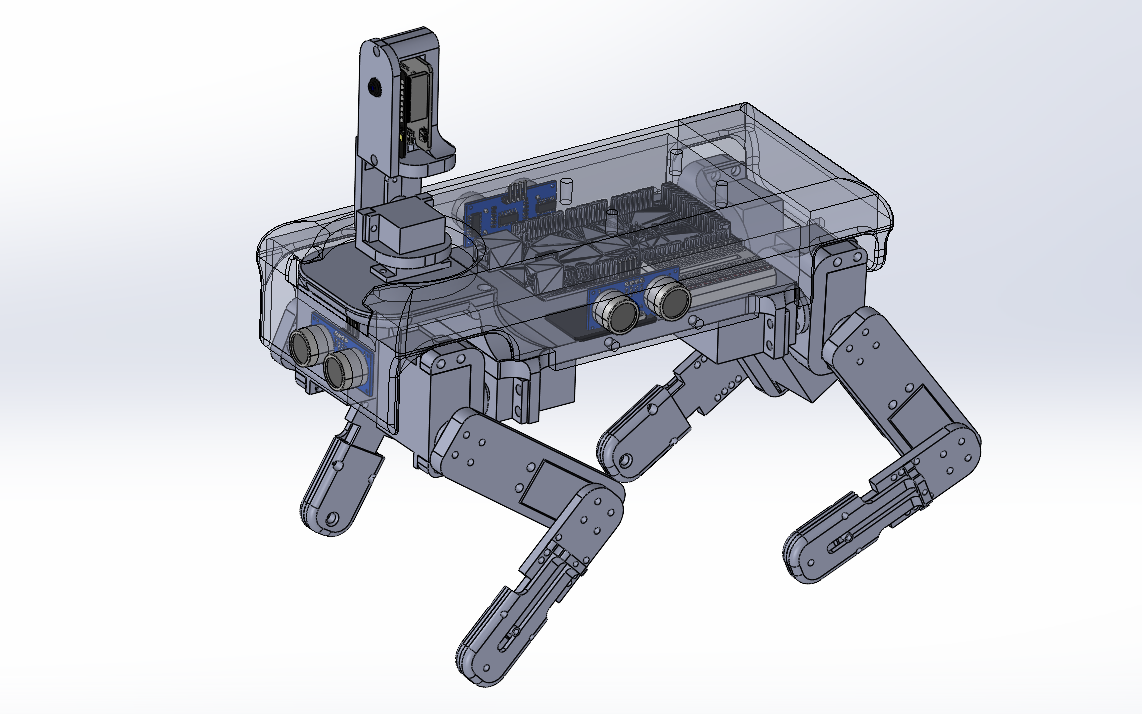
Type : Robotique / Projet expérimental
Objectif : Créer un robot quadrupède articulé avec des mouvements réalistes (marche, réactions).
Avancement : Étude de la cinématique et modélisation.
Technologies utilisées : Servomoteurs, Arduino, télécommande ou app mobile.
Particularité : Allie robotique animale, mécanique complexe et design interactif.
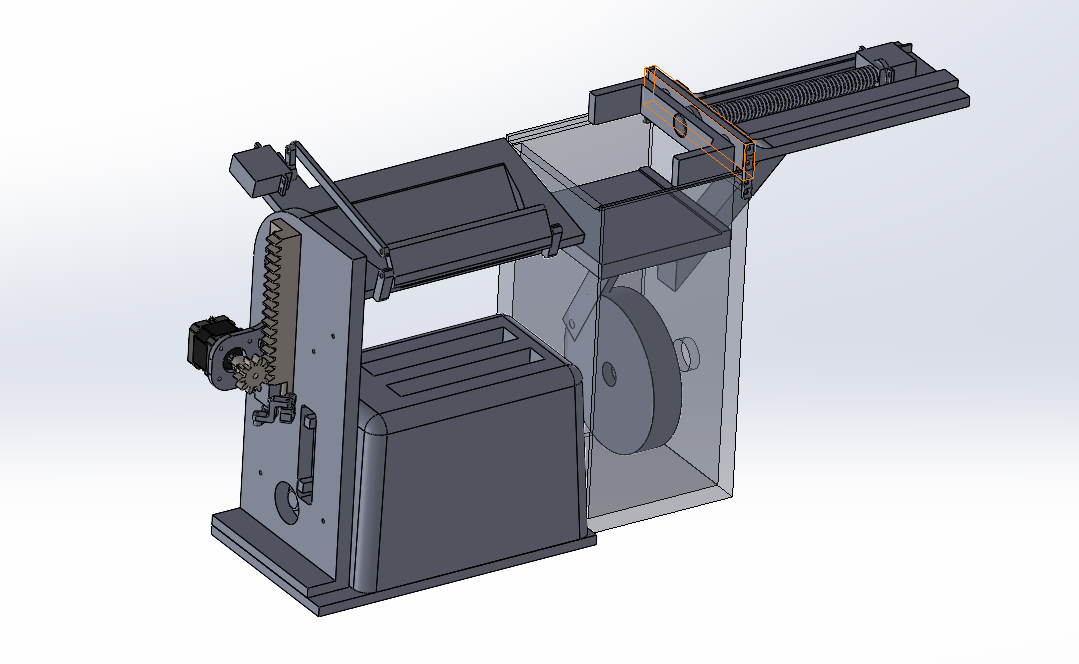
Remplisseur automatique de grille-pain
Type : Automatisation / Projet créatif
Objectif : Charger automatiquement des tranches de pain dans un grille-pain.
Avancement : Idée en phase de conception (étude de faisabilité).
Technologies utilisées : Glissière motorisée, bras articulé, capteur de position.
Particularité : Un projet original, ludique et technique à la fois.
Voiture télécommandée
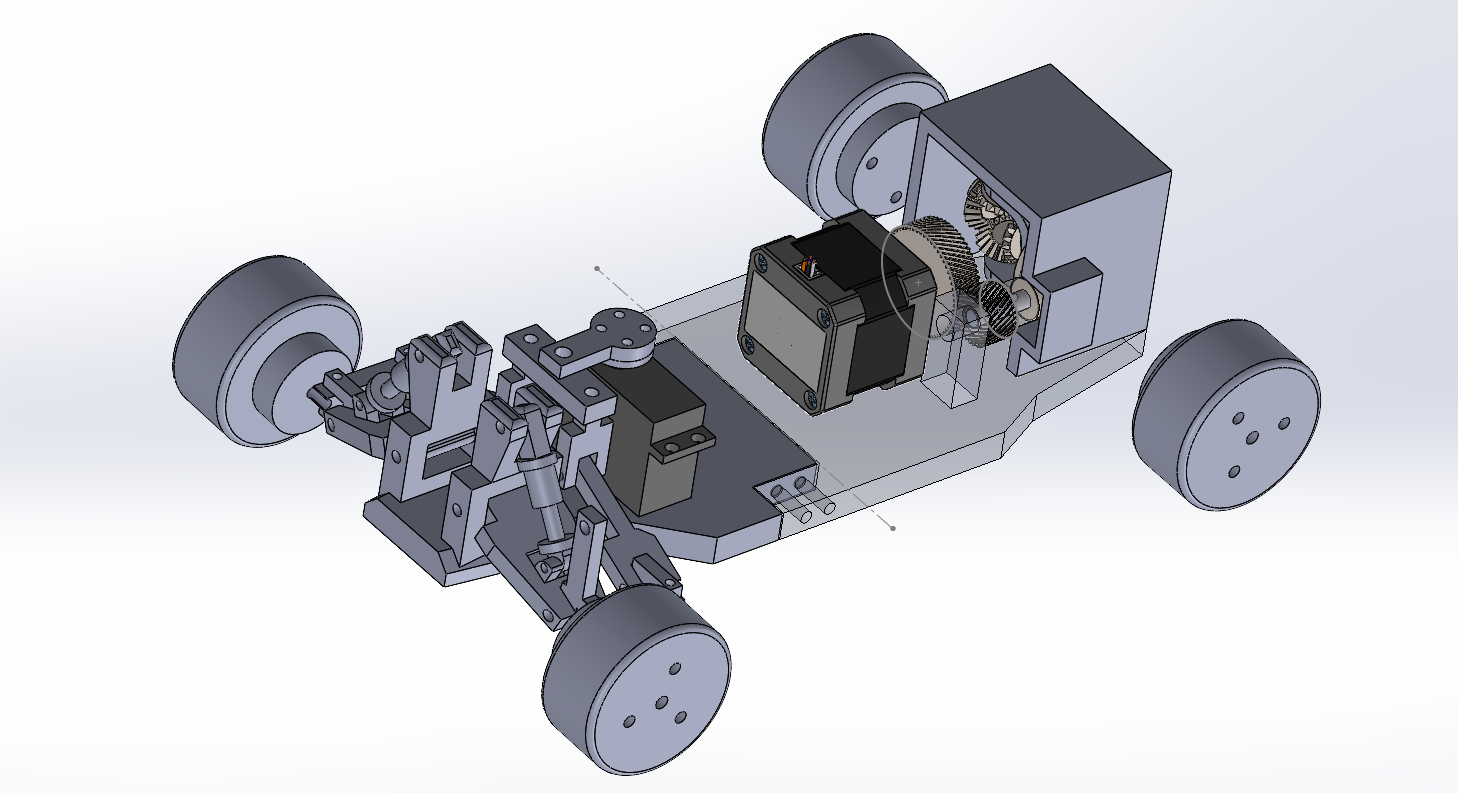
Type : Robotique / Projet loisir
Objectif : Concevoir une voiture contrôlable à distance, avec une bonne maniabilité et des options de personnalisation.
Avancement : Châssis assemblé, tests moteurs en cours, liaison radio à finaliser.
Technologies utilisées : Arduino ou ESP32, moteurs DC, contrôleur moteur, module RF ou Bluetooth, batterie Li-Ion.
Particularité : Projet accessible et fun, idéal pour expérimenter la commande à distance, la gestion de puissance et la structure mobile. Possibilité d’ajouter une caméra, des phares LED ou une app mobile plus tard.
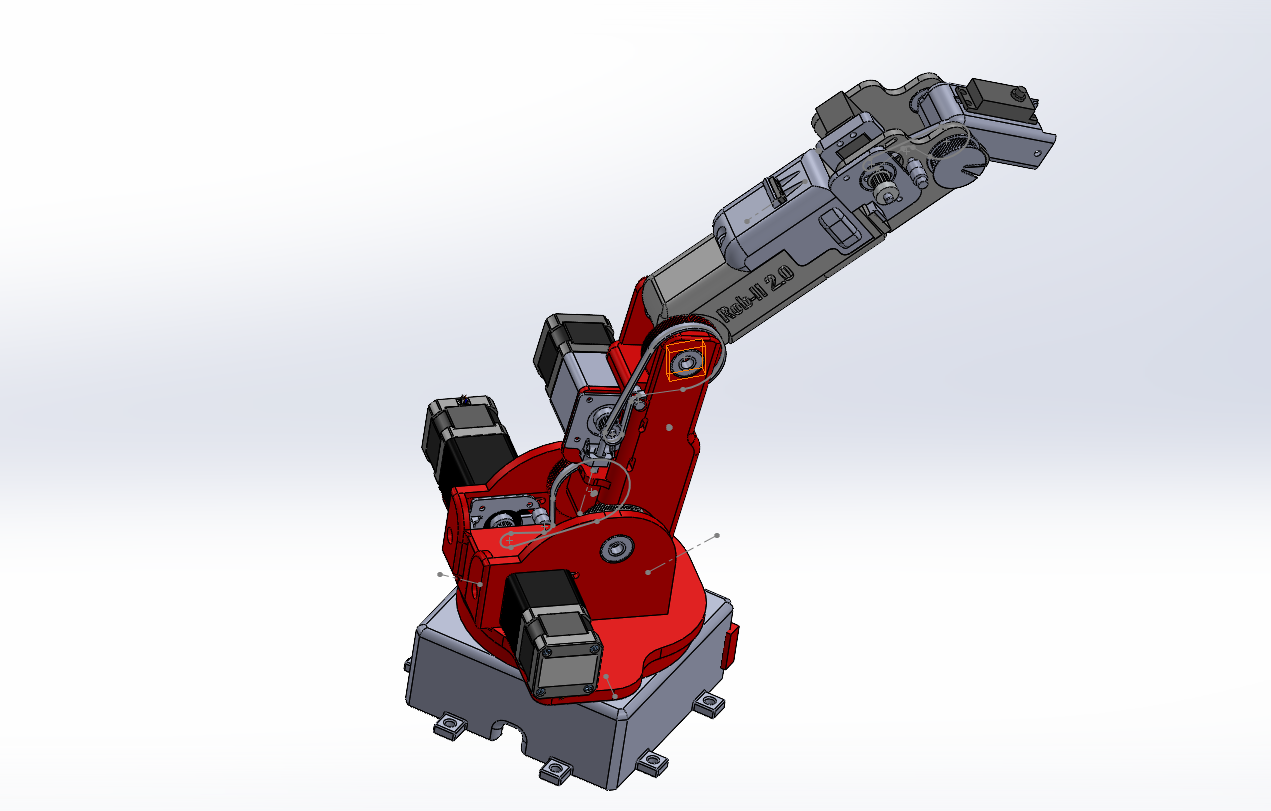
Robot 5 axes
Type : Robotique / Mécatronique
Objectif : Développer un bras robotisé à 5 axes capable de manipulations précises pour des tâches variées.
Avancement : Modélisation en cours + tests de motorisation.
Technologies utilisées : Fusion 360, moteurs pas à pas, drivers, Arduino / ESP32.
Particularité : Projet technique mêlant cinématique, mécanique et contrôle multi-axes.
Boîtier Ambilight

Type : Électronique / Domotique / Multimédia
Objectif : Créer un système Ambilight DIY qui synchronise un ruban LED avec les couleurs affichées à l’écran pour une immersion visuelle renforcée.
Avancement : Étude des composants + prototype en cours de test sur écran PC.
Technologies utilisées : ESP32 ou Raspberry Pi, bande LED WS2812, logiciel Prismatik ou HyperHDR, alimentation dédiée, impression 3D pour le boîtier.
Particularité : Reproduction maison d’un système Ambilight adaptable à tout type d’écran, avec personnalisation du boîtier, du comportement lumineux et contrôle possible via smartphone.
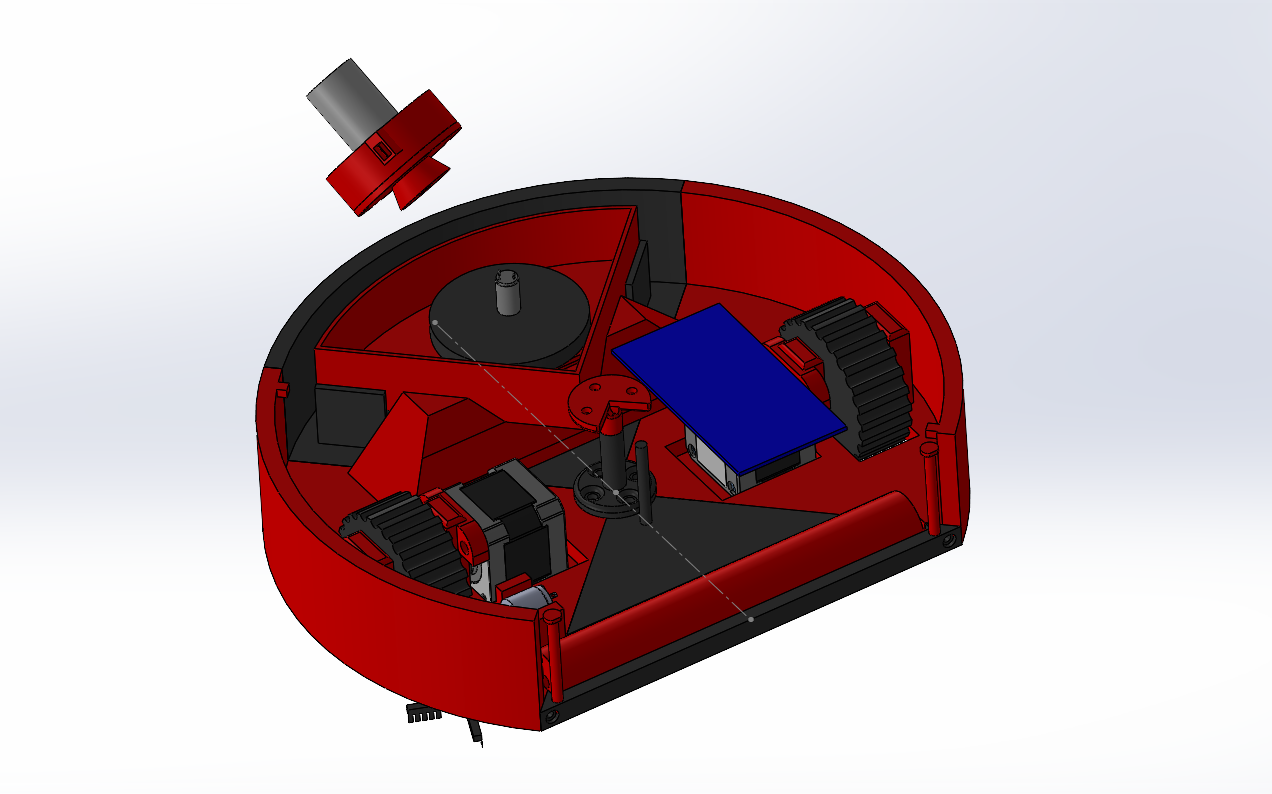
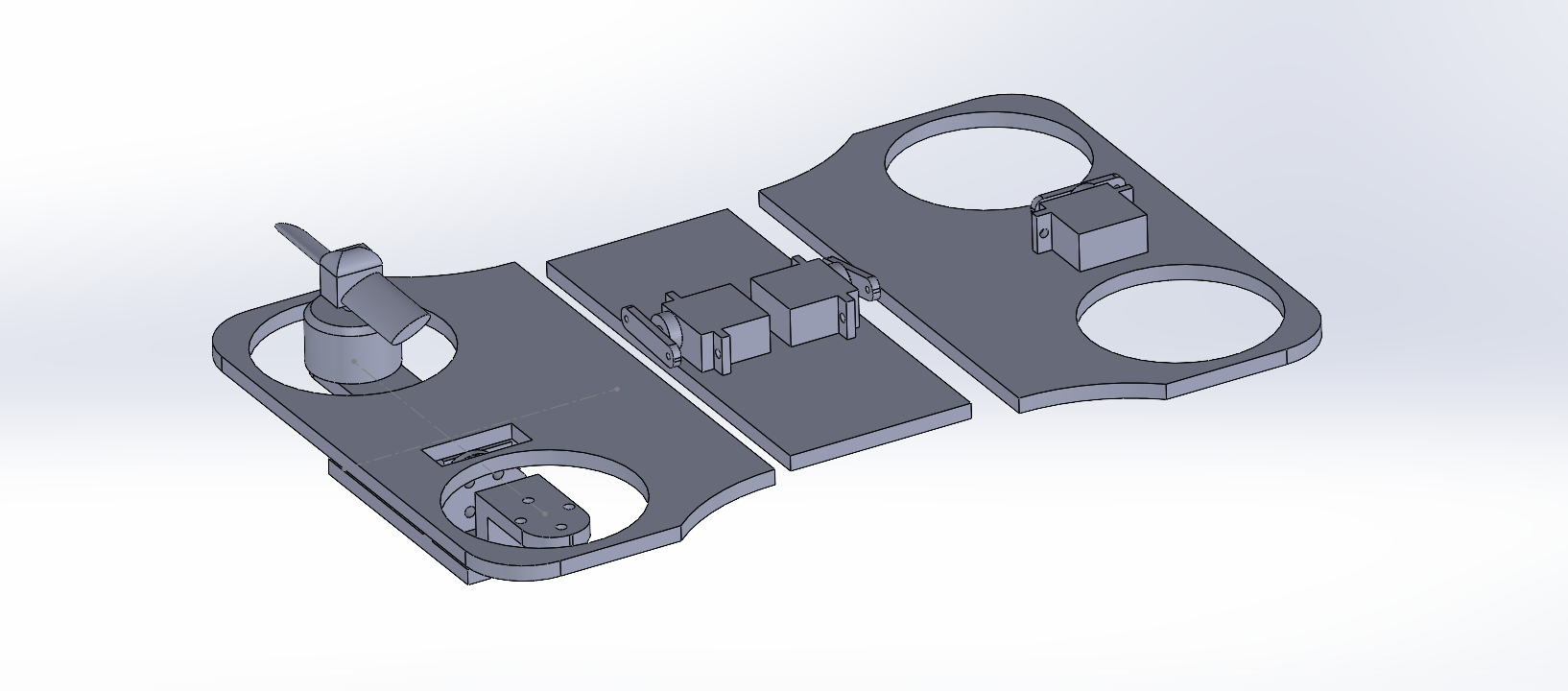
Robot aspirateur
Type : Domotique / Robot mobile autonome
Objectif : Concevoir un robot capable de nettoyer une surface de manière autonome, avec détection d’obstacles.
Avancement : Tests de capteurs (ultrasons, lidar) + base roulante en cours.
Technologies utilisées : ESP32, capteurs à ultrasons, moteurs DC, impression 3D.
Particularité : Reproduction à bas coût d’un robot domestique intelligent.
Drône
Type : Robotique / Drones / Aéronautique
Objectif : Concevoir un drone quadricoptère autonome ou télécommandé, capable de vols stables avec options de caméra et capteurs.
Avancement : Conception du châssis et sélection des composants terminées, début d’assemblage.
Technologies utilisées : Contrôleur de vol (ex. Pixhawk, Arduino), moteurs brushless, ESC, GPS, capteurs d’altitude, batterie LiPo, télécommande RC.
Particularité : Projet complexe alliant aérodynamique, électronique embarquée et contrôle en temps réel. Idéal pour expérimenter la stabilisation de vol et la programmation embarquée.
Laisser un commentaire